")
")

























編碼器 (Encoder) 是一種機電裝置,用於量測運動或位置。大部分的編碼器均使用光學感測器,以提供脈波列 (Pulse train) 型式的電子訊號,來進一步編譯為運動、方向、位置。
編碼器有許多不同種類,常見的有轉速和線性編碼器、絕對型編碼器和增量型編碼器等....。
編碼器分類
1.依機械結構,可分為轉速編碼器和線性編碼器 。
2.依編碼方式,可分為絕對型編碼器和增量型編碼器 。
3.依信號產生方式之不同,可分為機械接觸式編碼器、電磁編碼器和光學編碼器等。
轉速編碼器與線性編碼器的運作原理
轉速編碼器 (Rotary Encoder) 是編碼器的一種,可量測機軸的旋轉運動。
圖 1 為轉速編碼器的基本元件,包含 1 組發光二極體 (LED)、1 組碟狀物,與 1 組相對於 LED 位置的光線偵測器。
從圖 1 可了解轉速編碼器的工作原理:碟狀物固定於旋轉的軸上,並具有透明與不透明的區段形式。在碟狀物旋轉時,不透明區段將阻擋光線,而透明區段將允許光線通過。此將產生方波脈衝,稍後並可編譯至相關位置或運動中。轉速編碼器每週期可達 100 ~ 6,000 個區段 (Segment)。此亦表示,100 個區段的編碼器可提供 3.6 deg 的解析度、6000 個區段的編碼器可提供 0.06 deg 的解析度。
除了旋轉碟狀物之外,線性編碼器 (Linear Encoder) 的運作原理與轉速編碼器相同,在固定的不透明條狀物表面中穿插透明縫隙,並將 LED 偵測器安裝於移動的主體上。

圖 1: 光學編碼器元件
對於轉速編碼器而言,由於編碼器無法顯示旋轉方向,因此即便產生脈波集 (Set of pulse) 亦無太大用處。透過相位之外 90 deg 區段的 2 組碼軌,則編碼器的 2 個輸出通道,將可同時顯示旋轉的位置與方向 (如圖 2 所示)。舉例來說,若 A 在 B 之前,則碟狀物則為順時鐘方向旋轉。若 B 在 A 之前,則碟狀物則為反順時鐘方向旋轉。因此,只要同時監控脈波數量與訊號 A、B 的相對相位,即可得知旋轉的位置與方向。
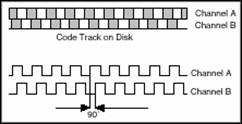
圖 2: 相位差編碼器 A 與 B 的輸出訊號
轉速編碼器分絕對型與增量型編碼器兩種
絕對型編碼器 (Absolute Encoder)
是透過包含旋轉、線性編碼器的增值式 (Incremental) 編碼器,雖可量測位置變化 (可從此決定電壓與加速度),卻無法決定物體的絕對位置。絕對型編碼器 (Absolute encoder)可編碼器的解析度是以位元表示,這些位元對應到一次旋轉的獨特資料字的數量。絕對編碼器 (Absolute Encoder) 分為單轉及多轉類型,單轉版本提供單次 360° 完整旋轉的位置資料,每當軸旋轉一週就會重複此完整旋轉。多轉類型則有一個旋轉計數器,能讓編碼器不只能夠輸出軸的位置,也能輸出旋轉週數。
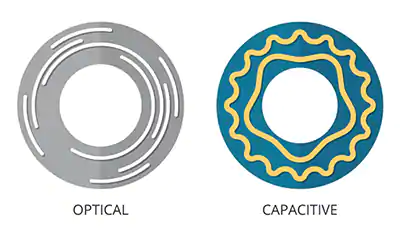
圖 3:絕對編碼器的碟片代表每個位置都有獨特的代碼,使輸出立即有效,並決定編碼器解析度。
增量編碼器 (Incremental Encoder) 的解析度以每轉脈衝數 (PPR) 表示,相當於任一個方形波輸出之高脈衝的數量。
觀察圖 4 即可發現只有四個清晰且重複的輸出狀態。因此,必須將增量編碼器參照至已知的固定位置,以提供有意義的定位資訊。此一「初始」位置即為編碼器索引脈衝。接著追蹤從該索引脈衝後的相對旋轉增量變化,計算軸的絕對位置。每次打開編碼器時,或在發生短暫斷電之後,都必須進行此參照程序,所以,軸必須先經過旋轉才能決定位置。若與不必做初始旋轉即可從絕對編碼器取得位置的程序相比,此程序比較慢。
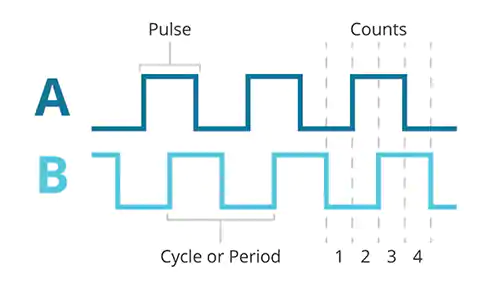
圖 4:增量編碼器產生相位差為 90° 的脈衝波型。
絕對型與增量型的比較:選擇標準
絕對編碼器比增量型還要複雜,因此一般來說也就比較昂貴。雖然價格差距逐漸縮減,針對速度、方向或相對位置等簡單的監控,還是建議使用增量編碼器。另外,在某些情況下,選擇絕對編碼器會比較好。
絕對編碼器有一項顯著優勢,就是軸的位置保持固定,所以不必等到歸回初始位置或完成校正程序,就可以立即得到位置資料。如此,即便軸的位置在編碼器關閉時更動了,仍可讓系統更快完成開機,或在斷電後迅速恢復。
選擇絕對編碼器的另一個理由,就是在啟用或移動任何機制前,必須在開機時立即得知位置資訊。如果從開始位置以錯誤方向旋轉軸,可能發生損及設備或對使用者造成危險的狀況。
另外,因為絕對編碼器會即時提供真實位置,數位系統可透過中央通訊匯流排對編碼器進行輪詢,以最小延遲時間擷取位置。透過增量編碼器連續追蹤位置更為困難,因為通常需要外部電路,使用正交解碼追蹤所有脈衝,導致主機系統負荷增加,特別是在需要監控多個編碼器時。
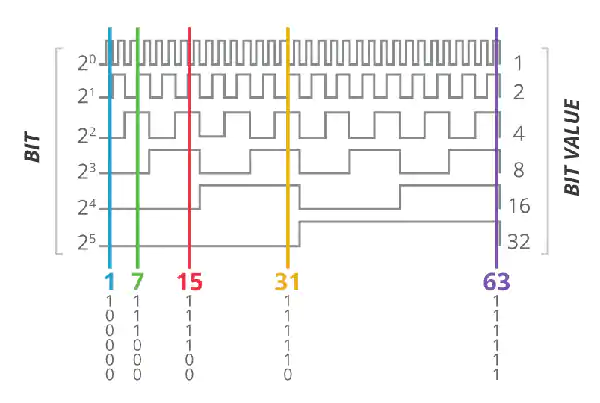
圖 5:絕對編碼器為碼輪每個位置產生獨特數位「字」 (等同於聲明的解析度)。
進一步的好處就是,使用絕對編碼器有助於減少系統受到電子雜訊影響的可能性。不同於脈衝計數增量編碼器,絕對編碼器可讓系統從二進位輸出值 (或以數位方式透過序列匯流排) 讀取已檢查錯誤的代碼,以計算位置。
此外,在同一個系統中結合多個絕對編碼器,比結合多個增量編碼器更容易。常見的相關例子包括工廠自動化或多軸機器人。監控多個增量編碼器的輸出可能會變得非常複雜,而且需有龐大的處理能力。然而,解讀個別絕對編碼器的讀數更為容易,如果能接上中央通訊匯流排更是如此。
隨著企業持續追求數位轉型,加上增量編碼器與絕對編碼器之間的價差逐漸縮小,絕對編碼器的應用充滿無限可能,無論是用來控制自動化門欄、攝影機穩定器、智慧型 HVAC 控制、工廠自動化或電動車子系統等各個不同的應用上。
編碼器的技術
旋轉編碼器雖然是必備項目,但往往被歸類成笨拙型裝置,單純用來提供脈衝訊號給較高階的控制器而已。過去不願意接受改變的編碼器使用者,隨著科技的進步,編碼器的技術也朝向智能發展。
機械接觸式編碼器是在電路板有一組的銅箔可以進行位置資料的編碼.再用碳刷感測銅箔的有無。除了數位萬用表外,現在已少有編碼器應用此技術。
光學編碼器是使用光學設定做開槽圓盤,其中一面有 LED,另一面則有光電電晶體。圓盤會旋轉並中斷光徑,因此產生的脈衝可指出軸心的方向和旋轉 (如圖6)。雖然成本很低,但光學編碼器的可靠性會隨著污染物而降低,例如髒污、灰塵和油垢,且 LED 的壽命有限制。
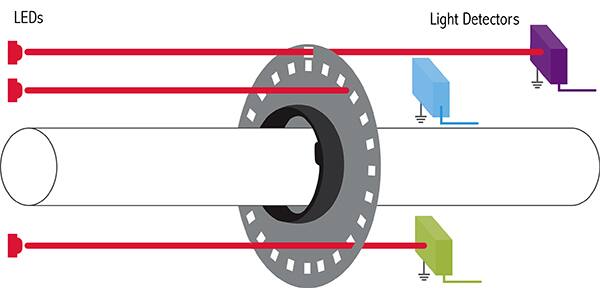
圖 6:這是傳統的光學編碼器設定。
電磁性編碼器和光學編碼器的結構非常相似,但前者使用磁場,而非光束。編碼器具備磁化圓盤,而不是開槽光學轉輪,此圓盤會繞著磁阻感測器陣列旋轉。轉輪只要轉動,即會在這些感測器中產生響應,該響應會傳送到訊號調整前端電路,藉此判定軸心位置。雖然磁性編碼器十分耐用,但準確度較低,而且容易受到電動馬達和驅動器產生的磁性干擾影響。
電容式編碼器則兼具光學及磁性編碼器設計的所有優點,且沒有兩者的缺點。這種編碼器更加耐用,且對環境微粒和磁性干擾的敏感性也很低。電容式編碼器有兩種線條圖形,一組位於固定式元件上,另一組位於移動式元件上。兩者共同組成可變式電容,可配置成發射器/接收器對 (圖 7)。編碼器會旋轉觸發一體式 ASIC,對這些線條變化進行計數,並執行內插計算,以追蹤軸心的方向,並藉此產生標準正交輸出,再搭配其他編碼器提供的換向輸出來控制 BLDC 馬達。
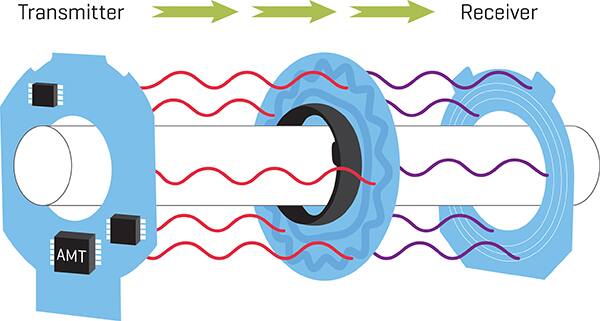
圖 7:電容式感測圖搭配正交條列和輸出波形。。
電容式編碼器可提供耐用效能。此外,與光學和磁性編碼器不同的是,電容式編碼器的數位輸出將引領設計邁入 21 世紀,有助於簡化產品的開發、安裝,甚至是維護作業。這種編碼器有個優點,能調整解析度 (每轉脈衝數),而不需要切換至解析度更高或更低的編碼盤。這可在開發期間,需要進行控制迴路最佳化時提高靈活性。
此數位技術也可達到簡單的「一鍵式」歸零,因此能輕鬆快速安裝,以及將換向訊號和 BLDC 馬達繞組調正。在此,使用者對適當的馬達相位通電,將軸心鎖定在目標位置,並命令編碼器在此位置歸零。這功能不需要使用特殊工具,而且總共只需要幾分鐘的時間,就能執行此功能。相較之下,要對光學或磁性編碼器進行歸零 (以機械方式讓換向訊號與馬達繞組調正),則相對複雜且令人沮喪,時間甚至可能長達 20 分鐘。
以電容式技術為基礎的 AMT 編碼器系列,其提供的優點不僅是改善效能與可靠度而已。這些編碼器提供智慧功能,以及全套的可編程設定與安裝特點。數位技術是運用智慧型介面能力的下一階段,以獲得傳統編碼器技術無法提供的益處。
不論您選擇那種編碼器,其相關應用領域有包裝業、醫療業、搬運與安裝系統、木材/塑料或金屬加工業、紙張及紙板生產加工業、紡織機械、電梯、機械自動化、風力發電廠及起重機等相關行業,BAUMER(堡盟)皆有豐富的產品系列提供您各種應用的位置與速度來檢測。

{kind=link}
{kind=link}
{kind=link}
{kind=link}